Technology
Systems, Inc.'s research and development led to the creation of an
advanced capability for operating ad-hoc networks in a low
bandwidth undersea environment. The application supports
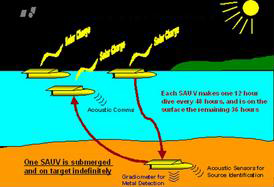
Autonomous Undersea Systems Networks (AUSNET), fleets of unmanned
robotic vehicles that can conduct survey, search, and monitoring
activities for the oil industry, environmental management,
undersea communications infrastructure, search and rescue, and
military applications. AUSNET has been demonstrated to
support undersea ad-hoc networking with increased performance
achieved through the exploitation of AUV fleet behaviors and the dead
reckoning of node locations.
The
AUSNET protocol was developed to provide an ad-hoc network capability
that was tailored for the low bandwidth undersea environment.
AUSNET has modified the DSR (Dynamic Source Routing) protocol by
optimizing it for undersea operation. Each network node is
capable of acting as a network router, so all network infrastructures
is inherent in the AUV fleet. The network grows or collapses as
nodes join or leave. It is self-healing and supports entirely
ad-hoc topologies. By exploiting fleet behaviors, overhead has
been significantly reduced. The expertise developed
under AUSNET is also being applied to other projects including
UAV video distribution, cooperative unmanned surface vehicle systems,
and multi platform unmanned systems mission planning systems.